
光とIPの国際会議iPOP2020で、山中研は論文の発表とブース、それからshowcaseへの参加を行っています。
iPOP2020は2020年9月10日~9月11日にバーチャルで開催されています。
https://www.pilab.jp/ipop2020/info/programataglance.html
パンフレット
https://www.yamanaka.ics.keio.ac.jp/wpcontent/uploads/2020/09/iPOP2020_brochure.pdf
Virtual Conference
https://www.yamanaka.ics.keio.ac.jp/wpcontent/uploads/2020/09/ipop2020_VirtualConf_CFP_Extended.pdf
COMMITTEE MEMBERS
https://www.yamanaka.ics.keio.ac.jp/wpcontent/uploads/2020/09/iPOP2020_WebConference_CFE.pdf
Keynote
※Online Proceedings will be available in Sept. 9th at https://www.pilab.jp/ipop2020/info/onlineproceedings.html
Please download them by yourself.
# file open password is ‘ipop2020.16th’.
◆T1-3 “PoC construction of Expected Capacity Guaranteed Routing (ECGR) based on k-shortest path for Various Networks”
Masahiro Matsuno, Masaki Murakami, Yoshihiko Uematsu, Satoru Okamoto, and Naoaki Yamanaka, Keio University, Japan
https://www.pilab.jp/ipop2020/info/onlineproceedings.html#T1-3
The multi-vendor optical transmission equipment that composes the access and metro network is rapidly progressing. This will lead to increasing in the expected system and network failure rate because of the difficulty of the system performance tuning. Also, Internet traffic is growing more rapidly and a backbone network with high transmission capacity is required. Therefore, a high-availability routing which overcomes the high failure rate is required. The improvement of the machine performance and the development of the data analysis technologies enables the failure prediction of a network system based on analyzing the collected data from network equipment [1]. Therefore, the survivable routing method considering the failure probability is studied. We have proposed a high-availability routing method called Expected Capacity Guaranteed Routing (ECGR) [2] which guarantees that the expected capacity calculated based on link failure probability exceeds the requested capacity of flows. In [2], a mixed integer linear programming (MILP) method is applied for multi-path route calculation. Therefore, the conventional ECGR has a problem that the computation time increases explosively as the number of nodes and links increases. To reduce the computation time, a k-shortest path routing method that calculates k routes in order from the shortest route is applied. ECGR route calculation is performed by setting the upper limit of allocation per route to the requested capacity and increasing the number of routes until the expected capacity constraint is obtained. Blocking occurs when the expected capacity constraint cannot be satisfied even if k is used. In order to confirm that the calculation can be completed within 60 seconds with k-shortest path based ECGR even if the number of nodes increases or any topology, a PoC was created. There are two hosts and they are connected with each other through an ECGR enabled network. In the PoC, the ECGR enabled network is composed of Open vSwitches connected to each other. A controller of the PoC consists of three controllers and one manager. An ECGR controller is a main controller of the PoC and it calculates the optimal route for the connection request from the sender host. It also manages available network resources, e.g. link capacity, and also manages Virtual LAN Identifier (VLAN ID) for multi-path transmission. After the ECGR controller calculating the route, it requests to an OpenFlow controller for configuring the paths between the sender host and the receiver host. Every switch is configured using an OpenFlow protocol. A multi-path frame converter manager supervises multi-path frame converters which are placed on the edge of ECGR enabled network. It receives the requested capacity and VLAN ID for assigned paths from the ECGR controller and configures the multi-path frame converters at the both ends of the route. An environmental controller is the element only for the PoC. It manages the state of each link and emulates the link failure according to the failure rate functions. In this presentation, we propose k-shortest path-based ECGR and describe operation verification of ECGR in a testbed and performance evaluation in computer simulation.
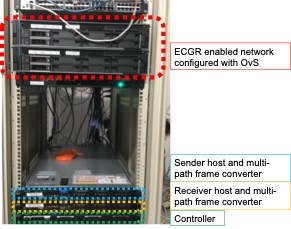
Fig.1 ECGR PoC system.
https://www.yamanaka.ics.keio.ac.jp/wpcontent/uploads/2020/09/iPOP2020_T1-3.pdf
◆T2-4 “Hierarchical Skew Handling over Massively Parallel Optical Channel for the Dynamic MAC”
Kyosuke Sugiura, Masaki Murakami, Satoru Okamoto, and Naoaki Yamanaka, Keio University, Japan
https://www.pilab.jp/ipop2020/info/onlineproceedings.html#T2-4
It is expected that the required transmission capacity for optical fiber will hit 1 Pb/s around 2030; whereas single-mode optical fiber (SMF) has physical limitations around 100Tb/s. To overcome this limitation, multi-core/multi-mode fibers have been developed [1]. Also, the ever-increasing traffic implies that a 10 Tb/s-class interface will be needed around 2030, which will be achieved by aggregating 400 optical channels. To this end, we propose a Dynamic MAC (Media Access Control), which effectively maps MAC client signals up to 400 optical channels [2].
The main challenge is how to effectively distribute MAC client signals up to 400 lanes. 100 Gb/s Ethernet employs a round-robin mapper that distributes MAC signals to 20 of PCS lanes on a 64-bit block basis, but it is a bottleneck in expanding PCS (Physical Coding Sublayer) lanes. Therefore, the Dynamic MAC introduces an intermediate layer just before PCS and gradually divide the MAC frame into a 64-bit block. In the emulator evaluation in [3], the number of parallelisms can be increased x1.73 by introducing the intermediate layer.
The Dynamic MAC has another significant challenge; how to handle skew. Skew is defined as the term between the earliest lane and the latest one. The Dynamic MAC may transmit signals over different core, fiber, routes. In the case of 100 Gb/s Ethernet, MLD (Multi-Lane Distribution) mechanism triggers lane swapping due to its bit multiplexing strategy. Therefore, 100 Gb/s Ethernet periodically insert AM (Alignment Marker) into each lane for skew handling and reordering lane. The Dynamic MAC inserts two types of AM; the intermediate layer inserts AM_outer and PCS inserts AM_inner. This enables local skew processing in the intermediate layer.
In this research, we show an example of a lane configuration that is considered optimal from the aspect of both scalability and skew processing. Besides, the details of signal generation are described.
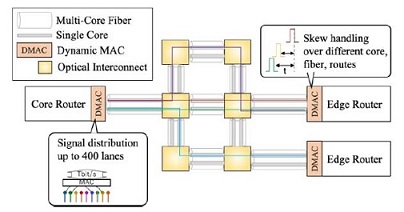
Fig.1 Dynamic MAC over Multi-core Fiber Optical Network
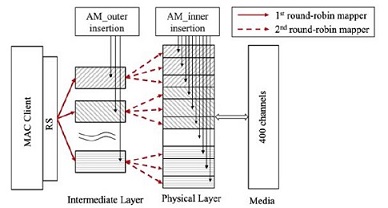
Fig.2 Internal Lane Structure of Dynamic MAC
https://www.yamanaka.ics.keio.ac.jp/wpcontent/uploads/2020/09/iPOP2020_T2-4.pdf
◆G-1 “gRPC Enabled Massively Parallel and Flexible Network”
Yutaka Nasu, Keio University, Japan
https://www.pilab.jp/ipop2020/info/onlineproceedings.html#G-1
Massively parallel transmission and flexible operations are essential toward 1Pbps class optical networks with Space Division Multiplexing (SDM). We propose the Dynamic MAC for SDM enabled networks. The Dynamic MAC allows massively parallel transmission ov er 400 optical channels and skews handling caused by different wavelengths, fibers, and paths. The Dynamic MAC can be controlled via gRPC, which is popular as a control interface among network equipment. gRPC makes it possible to operate MAC and other netw ork devices together by the same interface. This demo shows flexible traffic engineering that combines not only routing but also link bandwidth control by the Dynamic MAC.
https://www.pilab.jp/ipop2020/info/onlineproceedings.html#T2-4
◆P-2 “Automatic Camera Selection and Broadcast Method Based on Dynamic Optical Path among Edge Computers”
Yu Nishio, Masaki Murakami, Satoru Okamoto, and Naoaki Yamanaka, Keio University, Japan
https://www.pilab.jp/ipop2020/info/onlineproceedings.html#P-2
The number of videos has been increasing and is expected to continue to do so in the future. According to the Cisco Visual Networking Index (VNI)[1], it is predicted that 82% of IP traffic will be video by the year 2022. In particular, we have seen a remarkable increase in traffic for live streams. According to VNI, only 5% of video traffic was live streamed in 2017. However, they report that this is expected to increase to 17% by 2022. With multiple large streams of 4K and 8K video and other high-capacity streams on the network, there is a need for a dynamic optical path for video delivery. There are also three problems with real-time streaming video compared to recorded video. The first is that the user’s desired video changes as the content changes over time. Secondly, it is not possible to deal with unintended reflections of the object distributor. Finally, there is a dearth of ways to distinguish between similar videos. So I propose the automatic camera selection and broadcast method based on dynamic optical path among edge computers that illustrated in Fig 1.
In this method, each camera that is recording video first sends the video to the video management edge server. Users who want to watch the videos send their preferences to the video distribution edge server in advance. Next, the video management edge server uses machine learning to tag each frame of the video as shown in Fig 2. In this case, the tag weight is set according to the size of the object in the frame. Then, using the user’s preferences and the video’s tags, it sets the video’s score. Based on the scores of the videos, the user decides which videos to watch. And the video distribution edge server between the video management edge server to which the video belongs and the video distribution edge server to which the user belongs The dynamic optical path is used to distribute video. In this case, the video distribution edge server holds several videos that are high scoring for the user at the same time.
This method solves three problems with camera selection in three key ways. First, we created metadata for each frame of the video. Next, we used machine learning to metadata the objects in the frame. Finally, the weight of the metadata was determined according to the percentage of objects in the frame. This approach allows the user to watch the video according to his or her preferences.
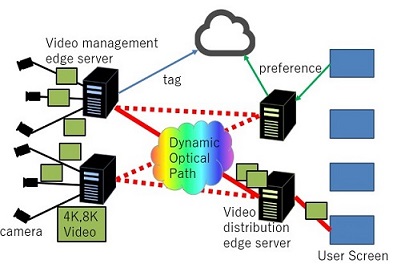
Fig.1 Automatic Camera Selection and Broadcast Method Based on Dynamic Optical Path among Edge Computers
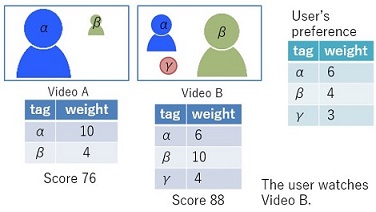
Fig.2 Camera selection using tags
https://www.yamanaka.ics.keio.ac.jp/wpcontent/uploads/2020/09/iPOP2020_P-2.pdf
◆P-3 “Proposal to predict location information for unconnected vehicle and control autonomous driving vehicle at intersections using optical network”
Ryosuke Shirai, Satoru Okamoto and Naoaki Yamanaka, Keio University, Japan
https://www.pilab.jp/ipop2020/info/onlineproceedings.html#P-3
A smart city that utilizes cyber-physical space (CPS) to solve urban problems is collecting much attention. CPS is a system that uploads data via network gathered in the real world to the cyberspace and feeds it back to the real world according to the analysis results. To realize CPS, a cloud server and many edge servers are connected by optical network.
An example of utilizing CPS in a smart city is an autonomous driving vehicle (ADV). In ADV platform, information gathered from connected cars and roadside units (RSUs) is sent to cyberspace. Then, ADV can perform an appropriate operation according to the information of the surrounding environment because ADV is controlled based on the calculation result in cyberspace. In addition, because of linked edge servers by optical network, it is possible to control ADV that deals with various QoS requirement.
Since collision accidents frequently occur at intersections, much research has been conducted on ADV control in consideration of safety [1]. However, ADV is controlled only based on their position information in these studies, so there is a possibility of a collision accident with an unconnected vehicle at an intersection.
To solve this problem, in this paper, we propose a method to predict location information for unconnected vehicles from a camera in the smart city and a method of ADV control at intersections where unconnected vehicles exist by linked edge servers. In the proposed method, an edge server controls ADV at each intersection. This edge computing is effective in terms of delay and network load. In addition, ADV is controlled by CPS that is constructed by linked edge servers, so edge servers are connected by optical network.
However, a single camera cannot predict that the unconnected vehicle will slow down due to obstacles that are not visible in the camera. As a result, ADV wastefully waits for an unconnected vehicle at the intersection, which reduces intersection throughput. Therefore, multiple cameras in the smart city are linked by an edge server to predict unconnected vehicles. (fig.1)
Also, in the method of ADV control, we propose a control based on the probability density to the positions of unconnected vehicles. (fig.2) By adding acceleration control to the vehicle control method, this method not only makes it possible to avoid collision accidents but also prevents a reduction in traffic throughput.
In this paper, a bicycle is used as a model of the unconnected vehicle. It is possible to avoid collision accidents while maintaining a high traffic throughput resulting from the computer simulation.
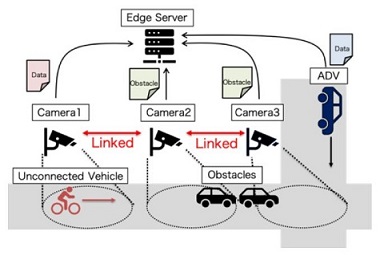
Fig.1 Linked multiple cameras in the smart city
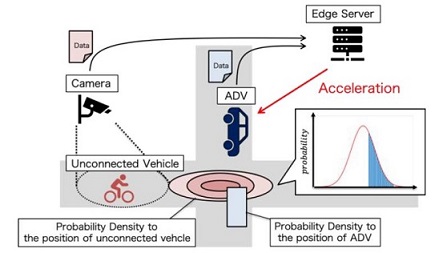
Fig.2 The method of ADV control
https://www.yamanaka.ics.keio.ac.jp/wpcontent/uploads/2020/09/iPOP2020_P-3.pdf